
鉄道分野における3次元レーザースキャナー(TLS)を用いた新たな可能性
- 高速・高精度な点群取得が鉄道DXを加速する -
鉄道インフラの維持管理や高度化が求められる中、3次元レーザースキャナーを活用した点群計測は、これまでにない価値を鉄道業界にもたらしています。


Kinematic Appの特徴やワークフロー、計測した点群の例などをご紹介します。
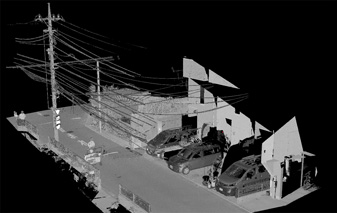
TLSの通常計測は、内部のミラー回転が縦方向にラインスキャンしながら25秒で水平回転1周することによってパノラマの3次元データ(6mm@10m) が取得されます。
計測が完了したら、次の計測位置にスキャナーを設置して再びスキャンを実行します。
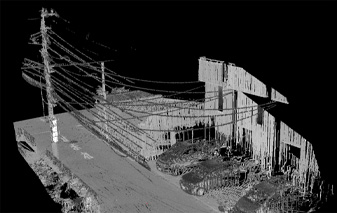
超高速なスキャンスピードを利用する、TLS キネマティック計測

TLS自体の位置が移動しながら計測を続けていくので、移動した分だけ計測される範囲が広がっていきます。
これは、MMS (Mobile Mapping Sysytem)の計測に近いイメージです。
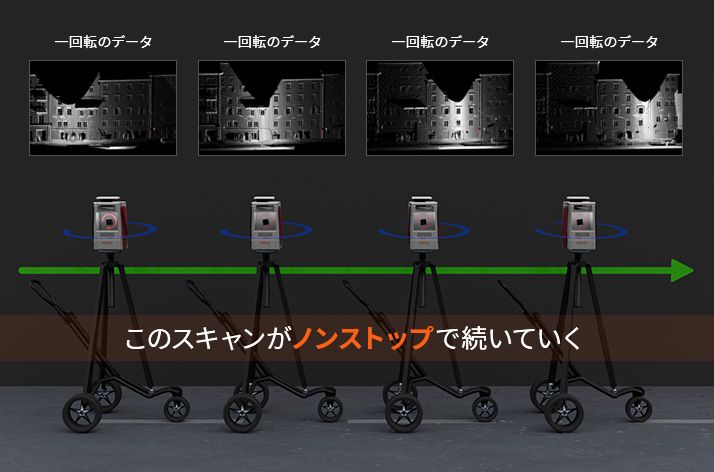
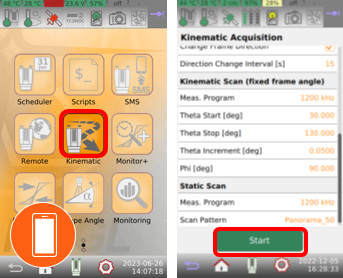
Kinematic Appは、スキャナーは約2秒で水平方向1回転。
縦のラインスキャンと水平回転を続けながら、連続的にスキャンしていきます。
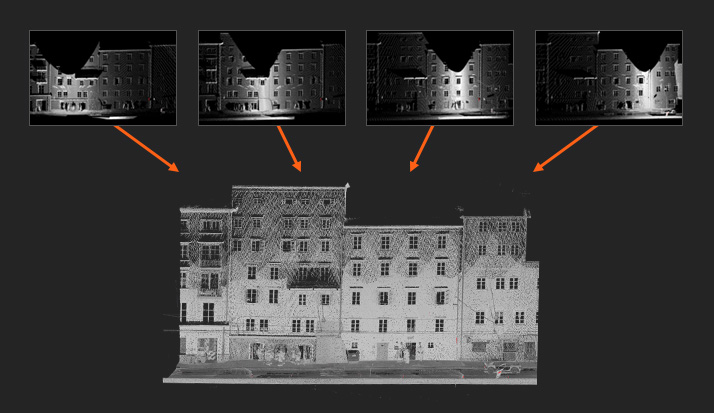
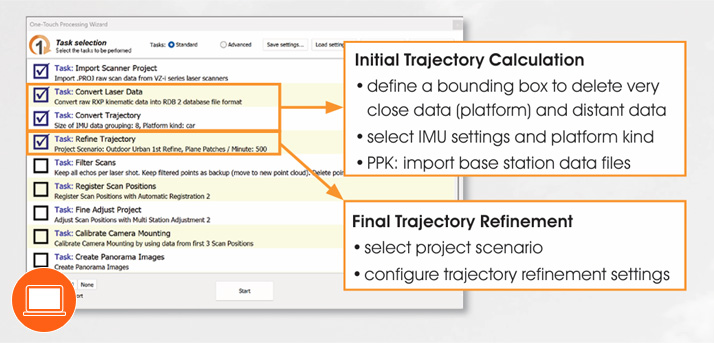
ソフトウェア処理によってバラつきの少ない点群データが完成します。
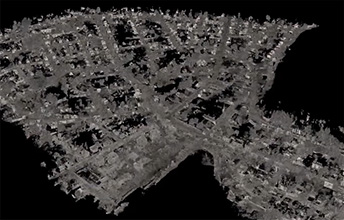
MMSではコストがかかりすぎるが、SLAMでは点群データの品質に納得できない場合。TLSほどは精度を求めないが、広範囲な3次元データが必要な場合に真価を発揮します。
短時間でざっとしたデータを取る場合に最適。







オプションの外付けカメラを導入することで、カラー点群化が可能です。 詳細についてはお問い合わせください。


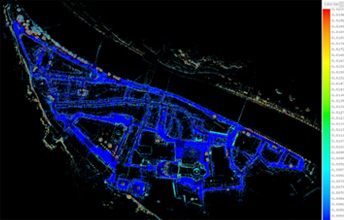
※15m間隔で計測した場合のシミュレーション
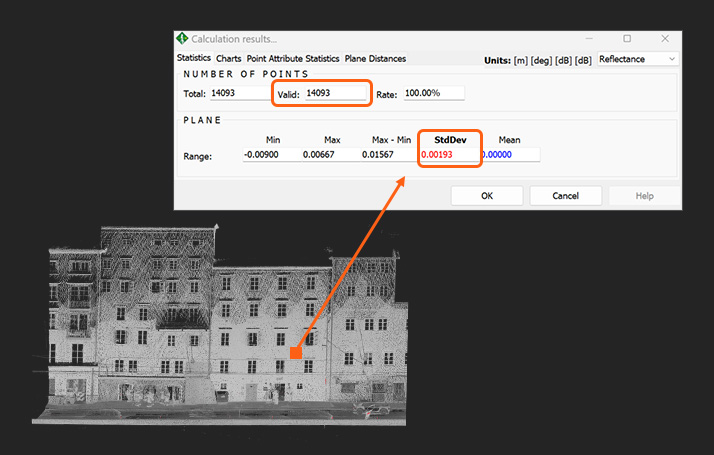
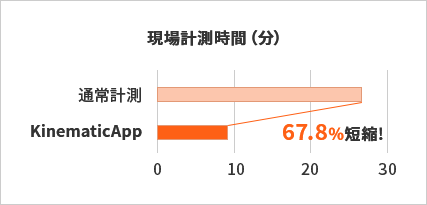
※実測値
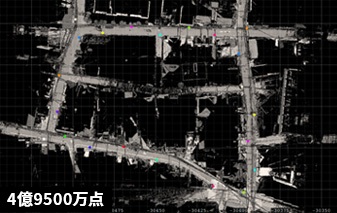
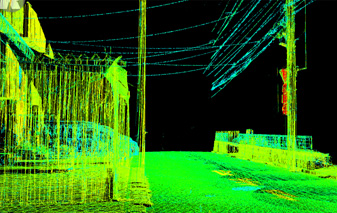
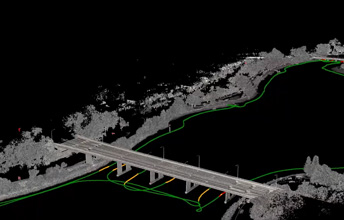
左図は点群のばらつきをカラー段彩表示したものです。点群のばらつきは5mm以下となり、VZ-600i通常計測の場合と同等レベルになります。









鉄道分野における3次元レーザースキャナー(TLS)を用いた新たな可能性
- 高速・高精度な点群取得が鉄道DXを加速する -
鉄道インフラの維持管理や高度化が求められる中、3次元レーザースキャナーを活用した点群計測は、これまでにない価値を鉄道業界にもたらしています。
TLSレーザースキャナをご希望の方へ、製品資料をご用意しております。
資料の一部を下記よりご確認いただけますので、ご入用の方はフォームよりご連絡ください。






