
目次

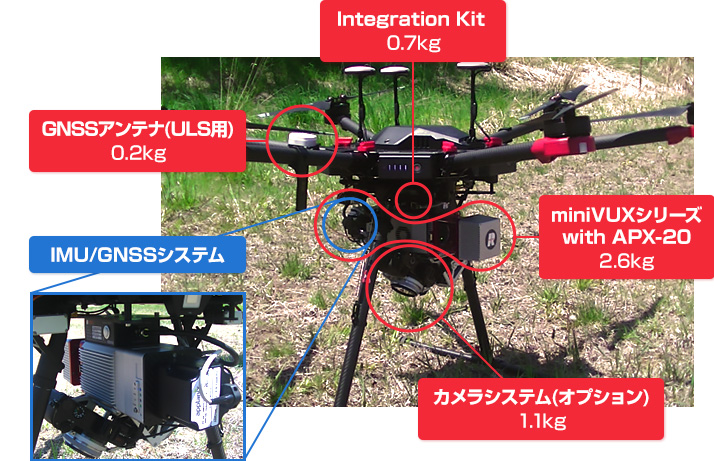
UAV LiDARで取得される3次元データの品質は、レーザースキャナー自体の精度はもちろんのこと、IMU/GNSSシステムのシステムスペックが最も重要な要素となります。RIEGL純正システムはApplanix APX-20UAVを採用しています。
| IMU & GNSS ※詳細はApplanix データシート参照 |
Applanix APX-20 UAV |
|---|---|
| IMU精度 ロール / ピッチ ヘディング |
0.015° 0.035° |
| IMUサンプリングレート | 200 Hz |
| 位置精度(標準) | 0.02-0.05m |
さらに、レーザースキャナーとIMU/GNSSシステムが高精度なキャリブレーション(レーザースキャナーとIMUの取付けは必ず個体差が生じるためにキャリブレーション値はシステム毎に異なる)によってインテグレーションされることによって、高品質なデータを取得できるUAV LiDARシステムとなります。
ドローン除くシステム総重量 約3~4kg(miniVUXの場合)
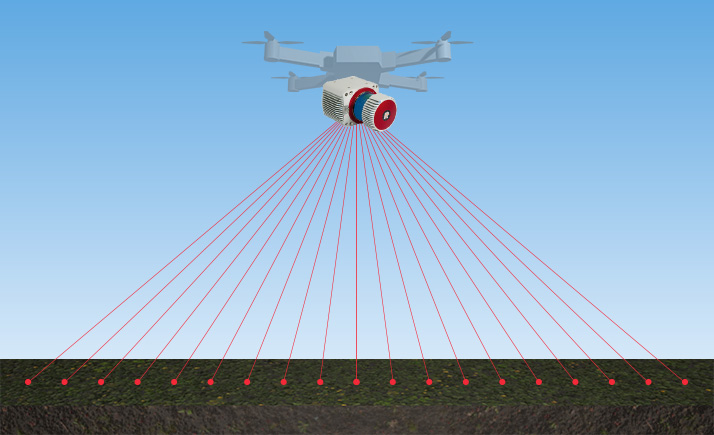
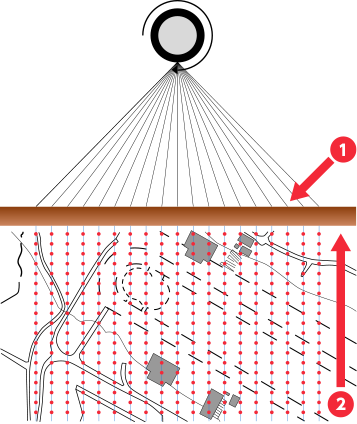
① 横断方向
レーザー計測データ端部は計測点間隔が最大となることに注意
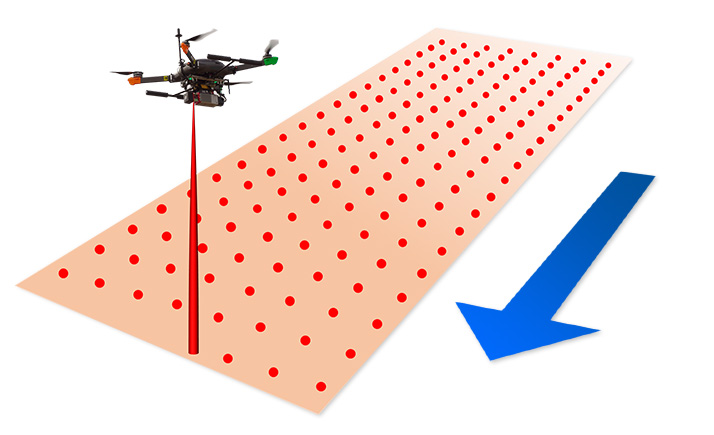
② 進行方向/横断方法
飛行速度、飛行高度、スキャン回転数、レーザー発射回数によって計測点間隔が変わる
UAV(ドローン)に搭載されるLiDARには複数走査(複数チャンネル)タイプ、非反復走査パターンなどもありますが、RIEGLのLiDARシステムは全てシングルラインスキャンです。リニア―な点群データが取得可能です。
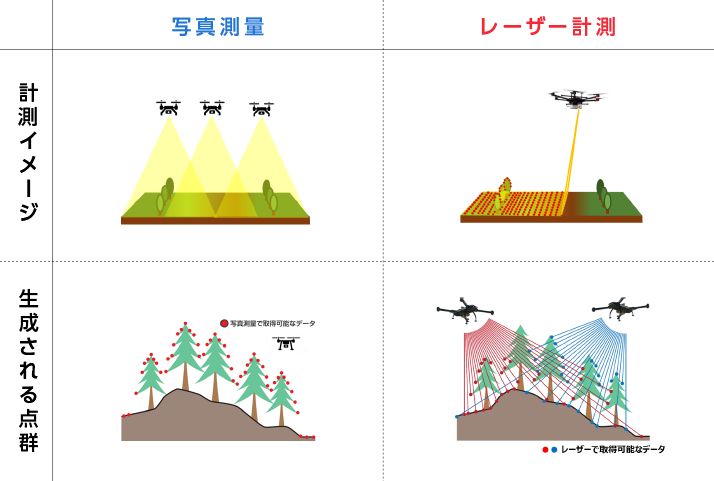
植生下のデータが欲しいような場面では、UAVレーザーが有用です。
裸地の場合は、状況に応じて 写真 or レーザーを選択することが重要です。
協力:金井度量衡 株式会社
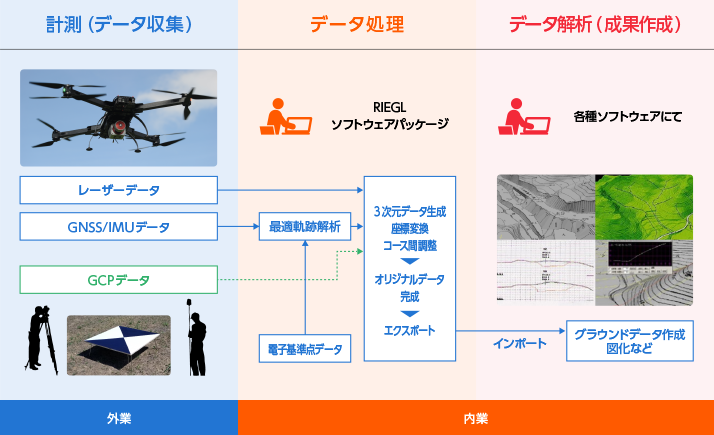
RIEGL純正システムのデータ処理(オリジナルデータ作成)はRIEGLソフトウェアパッケージを使用したマニュアル処理となります。
マニュアル処理はユーザー様が操作を覚える必要があり、ソフトウェアのイニシャルコストもかかりますが、最大のメリットはマニュアル処理よるユーザー様のノウハウの蓄積とともに、細かな調整/処理ができることで「より高品質な3次元データ」を生成することが可能というところです。
※高品質なデータ生成のためには、正しいUAV LiDARのフライトも前提となります。
UAVレーザースキャナをご希望の方へ、製品資料をご用意しております。
資料の一部を下記よりご確認いただけますので、ご入用の方はフォームよりご連絡ください。






